LiDAR Seeker Simulation (LiDARSIM)
LiDARSIM has been developed so that data collection from different pieces of hardware may be simulated, without having to physically have the equipment with you. In this manner, it is a useful tool for hardware developers who want to see the results of a potential hardware arrangement without building it. Additionally, those who would use the data for pattern-recognition software or other purposes have the opportunity to "collect" data without physically assembling and operating the hardware, thus saving a lot of time and money.Here's an image of the main user interface in LiDARSIM 3.0.
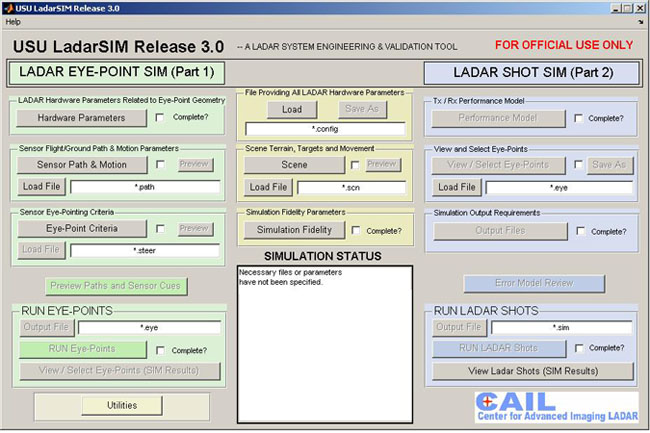
There are two types of simulations the user may run: a LiDAR EYE-POINT SIM or a LiDAR SHOT SIM.
The LiDAR EYE-POINT SIM is used to model the movement of the sensor in a scene and where the sensor is looking. To model where the sensor is looking, criteria must be defined to indicate where the user wants to look, as well as parameters defining how the hardware responds to the user's commands.
The LiDAR SHOT SIM is used to model the beam of light emitted from the LiDAR sensor and how well the sensor can detect the reflected light returning to the system from the environment.
Both sides require a simulated scene for the sensor to move in and look at, information defining the operation of the hardware, the position of the sensor, and the direction the sensor is looking.